 技术参数
技术参数 产品详情
产品详情 资料下载
资料下载 视频
视频 相关产品
相关产品











可轻松实现内陆湖泊、河流、水库等

按规划航线自主测量,高效采集水下数据

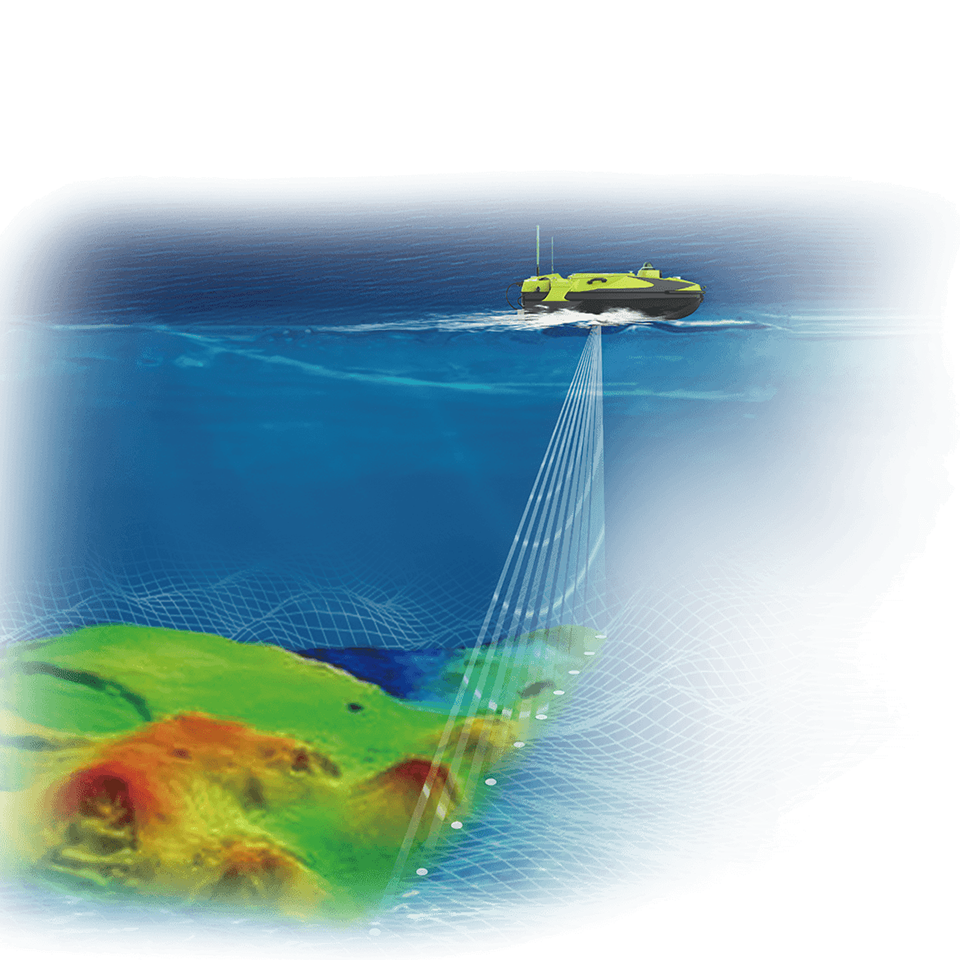
精确还原水下地形地貌,测量精度准确可靠


兼容多种载荷以适应不同的流域环境
胜任所有测量需求




|
iBoat BS15 技术参数 |
|||
|
船体 |
船体尺寸 |
1530mm*694mm*478mm(长*宽*高) |
|
|
船体材质 |
碳纤维、凯夫拉防弹布高强度复合材料 |
||
|
船体自重 |
15kg |
||
|
最大载重 |
75kg |
||
|
抗风浪等级 |
4级风、3级浪 |
||
|
船型 |
M型+三体船底设计,阻力小、航行稳 |
||
|
定位定向 |
船体内置GNSS定位定向双天线 |
||
|
吃水 |
118mm |
||
|
指示灯 |
两个指示灯,遥控器信号和GNSS定位状态指示 |
||
|
视频 |
360°云台摄像头 |
||
|
测量安全 |
浅滩悬停保护、毫米波避障自动避障和视频观察 |
||
|
避障距离 |
0.2-40m |
||
|
避障范围 |
俯仰14°,方位112°,64个目标同时探测跟踪 |
||
|
防水防尘 |
IP67 |
||
|
船体防护 |
船身配备防撞条,双层隔水仓设计,防船沉没 |
||
|
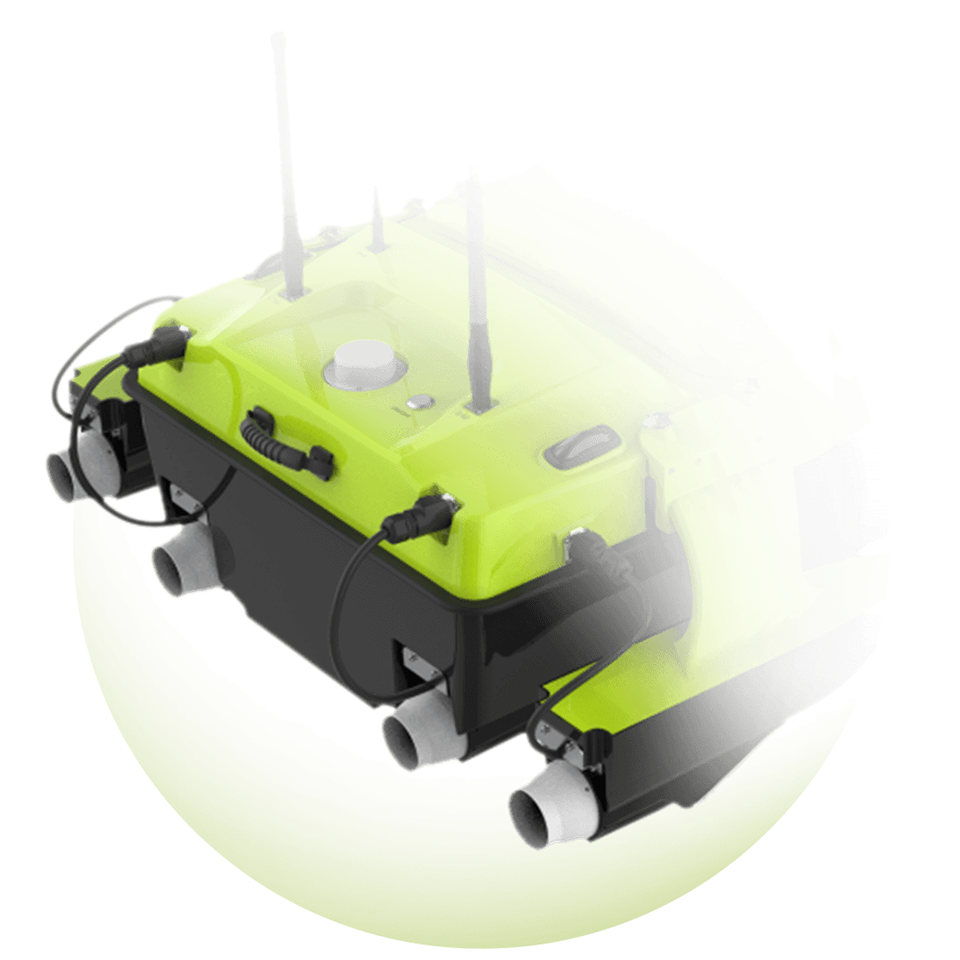
动力 |
推进器类型 |
无刷电机,无舵机 |
|
|
推进器转向 |
4推进器设计,支持4推、3推、2推工作;差速转向,支持倒车 |
||
|
推进器功率 |
1000W |
||
|
推进器安装 |
插拔设计、易拆换、可方便清理水草 |
||
|
推进器防水草 |
半嵌入式涵道式设计、配备防水草网 |
||
|
电池规格 |
单块电池34Ah,可充电锂电池,具备热插拔以及电源均衡管理 |
||
|
续航时间 |
标配6块电池,7小时@2m/s,12小时@1.5m/s |
||
|
最大船速 |
6m/s |
||
|
定位 |
卫星跟踪 |
BDS B1I/B2I /B3I、GPS L1C/A/L2P(Y)/L2C/L5、Galileo E1/E5a/E5b、 |
|
|
通道数 |
1408通道 |
||
|
冷启动时间 |
<30s |
||
|
初始化时间 |
<5s(典型值) |
||
|
单点定位精度 |
平面1.5m、高程2.5m |
||
|
DGNSS精度 |
平面0.4m、高程0.8m |
||
|
RTK定位精度 |
平面±8mm+1ppm、高程±15mm+1ppm |
||
|
定向精度 |
0.1°(1m基线) |
||
|
IMU精度 |
零漂2.1°/h,失锁30秒后精度衰减至1m以内 |
||
|
IMU更新率 |
200Hz |
||
|
控制 |
操作系统 |
Linux+RTOS双系统 |
|
|
RTK差分 |
电台&网络&CORS&遥控器差分,赠送1年CORS账号 |
||
|
网络制式 |
4G全网通,TDD-LTE,FDD-LTE,WCDMA,TD-SCDMA,EDGE,GPRS,GSM |
||
|
电台协议 |
HI-TARGET,TRIMTALK450S,TRIMMARKⅢ,TRANSEOT,SOUTH,CHC,SATEL |
||
|
SIM卡槽 |
内置eSIM卡,赠送3年流量,可外插Nano SIM卡 |
||
|
内存 |
主控内置16GB数据存储 |
||
|
船型识别 |
船型自动识别,并自动改正各传感器安装偏差值 |
||
|
航行控制 |
支持手动&全自动航行,以及定速巡航 |
||
|
返航控制 |
低电量自动返航、失联自动返航,支持线返航和最优路径返航 |
||
|
内置WEB |
内置WEB管理系统,实时监控无人船工作状态 |
||
|
遥控 |
显示屏 |
7.0寸工业触摸屏+阳光可视屏 |
|
|
分辨率 |
1920*1200 |
||
|
安卓系统 |
Android 9.1 |
||
|
内存 |
运存 4GB,存储64GB |
||
|
通讯频率 |
2.4GHz |
||
|
通讯距离 |
数传电台2km,4G无限制 |
||
|
工作续航 |
7.5小时 |
||
|
充电时间 |
36W快充,充电时长4小时 |
||
|
重量 |
1.2kg |
||
|
软件 |
数据采集 |
支持坐标转换,船行轨迹、测量水深和回波实时显示 |
|
|
地图底图 |
支持在线天地图、MapBox等底图 |
||
|
PPK解算 |
支持PPK后处理解算 |
||
|
数据处理 |
支持测量数据后处理,支持IMU姿态改正 |
||
|
数据存储 |
软件与无人船双存储,双备份 |
||
|
数据下载 |
U盘、Type-C |
||
|
软固件升级 |
支持软固件在线推送升级 |
||






 顶部
顶部